![World Robot Summit 2025 Harsh Environment F-REI Challenge [Standard Disaster Robotics Drone Challenge (STM)]](images/sdrdh/page_ttl.png)
![World Robot Summit 2025 Harsh Environment F-REI Challenge [Standard Disaster Robotics Drone Challenge (STM)]](images/sdrdh/page_ttl_sp@2x.png)
Evaluation of 4 standard abilities in harsh environment (Maneuverability, Dexterity, Mapping, Autonomy)
Aiming to promote implementation of drone in harsh environment,
evaluating 4 abilities in the various harsh environment fields abstracting plants or disaster site.
Robots
- Either remote-controlled or autonomous robots are accepted. Robots must be controlled without being viewed directly by the operator.
- Any mobility type of robots could carry out tasks in the field are allowed.
- Maximum weight 10kg, maximum size at start position within a rectangular prism with the sum of its three orthogonal edge lengths amounting to 1.5 meters.
- Guard devices should be attached to rotary wings (propellers).
- The number of robots is unlimited.
Robot Operator
1 person (operator change during the competition is allowed)
Competition Field
4 abilities are assessed in the 4 fields.
Environment may change in each field.
Competition Time
30 mins (prep 5 mins, task 20 mins, removal from field 5 mins)
Extra points will be awarded for robots with environmental resistance.
Task
Contents of Evaluation
- Mobility (MOB)
- To evaluate the time of 10 round trips in the competition field.
- Detection (DEX)
- To evaluate the degree of task accomplishment.
(See the rule book released later)
- Map Creation (MAP)
- To evaluate the ability of map creation, position estimating and comprehension, and embedding information into the map.
- Autonomy (AUTO)
- To evaluate autonomy of MOB and DEX.
(Sketchy form and
view from above and route)
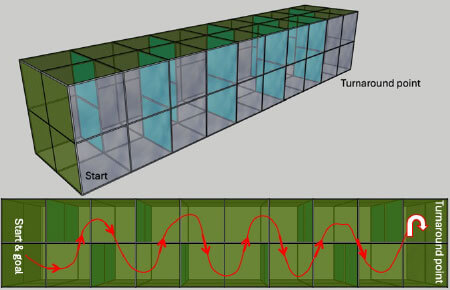
Competition field 1 Horizontal Slalom in Confined Space
Go and return avoiding vertical wall set alternately right and left in closed space, 2m in width, 2m in height, and 10m in depth (tentative plan).
- Challenge
- Performance evaluation
(Left and right maneuverability, Detection, Map creation, and Autonomy)
(Sketchy form and
view from the side and route)
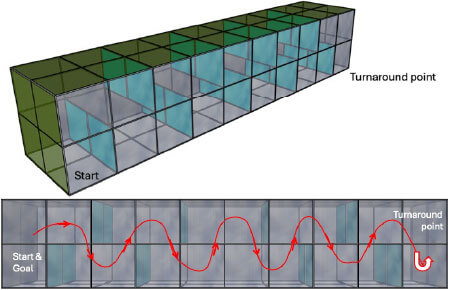
Competition field 2 Vertical Slalom in Confined Space
Go and return avoiding walls set alternately on the ceiling and the floor in closed space, 2m in width, 2m in height, and 10m in depth (tentative plan).
- Challenge
- Performance evaluation
(Up and down maneuverability, Detection, Map creation, and Autonomy)
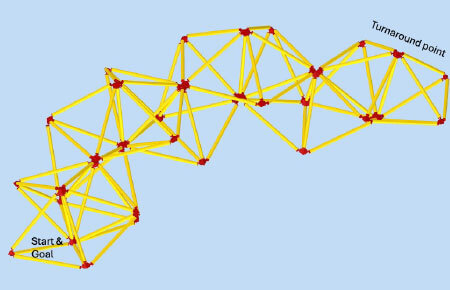
Truss Field (Sample)
Competition field 3 Truss Field
Go and return in the truss field with regular tetrahedrons and triangular prisms of pipes.
- Challenge
- Performance evaluation
(Maneuverability, Detection, Map creation, and Autonomy)

Competition field 4 Composite Field (Secret Field)
The field combining basic units of competition fields 1, 2, and 3 and unveiled on the day of competition.
- Challenge
- Performance evaluation
(Maneuverability, Detection, Map creation, and Autonomy)
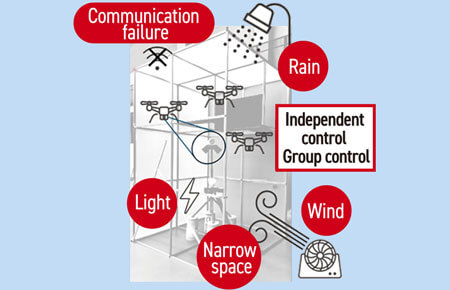
Introduction of harsh environmental factors
- - Narrow openings
- - Wind
- - Enclosed spaces
- - Smoke/Fog
- - Dust (Fine particulates or paper scraps)
- - Bright lights
- - Negotiating dark spaces
- - Rain
- - Radio interference
Harsh Environment Challenge elements will be open to selection on the field according to the competition stage (Preliminaries, Semi-finals, Finals) and will be scored according to the difficulty of each element. The difficulty of the elements will increase and the range of choices will narrow down as the competition advances to the Semi-finals and Finals.