![World Robot Summit 2025 Harsh Environment F-REI Challenge [Plant Disaster Challenge]](images/pdc/page_ttl.png)
![World Robot Summit 2025 Harsh Environment F-REI Challenge [Plant Disaster Challenge]](images/pdc/page_ttl_sp@2x.png)
Inspection or emergency response to abnormalities at plants with commands from digital twin
Aiming to construct "Plant Robot Digital-twin System*1",
introducing digital twin into emergency response and inspection to abnormalities at deteriorated plants
*1 See details on rulebook
Task

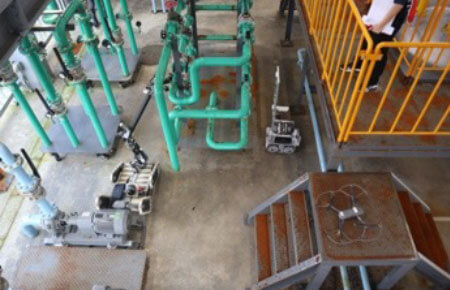
Mission P1 Inspection/Adjustment
The robot inspects facilities following the command from digital twin. It reads numerical values displaying on meters like pressure gauges automatically and reports them to digital twin. Then the robot open/close the valve as specified by digital twin.
- Challenges
- - Mobility and control in confined space
- - Inspection with visual obstacles like smoke or vapor


Mission P2 Fault (Abnormality) detection
During inspection of plant facilities, the robot detects an abnormality and report it quickly. Then, following the command of digital twin, the robot responds to the abnormality promptly to prevent accidents.
- Challenges
- - Fault detection and emergency response with visual obstacles like smoke or vapor
- - Real-time adaption to the unforeseen and fluid environment


Mission P3 Diagnosis: Tank
The robot finds some abnormalities (cracks or metal loss) due to aging/deterioration on the wall of large tank. The robot reports the results of inspection for designated area to digital twin.
- Challenges
- - Evaluation of health of large-scale structure under wind and rain
- - Accuracy of information about fault




Mission P4 Accident response: Remove Debris/Valve control
An explosion has occurred in the boiler. To respond to the accident, the digital twin has ordered the robot to survey the damage and remove the scattered debris to the designated area. Furthermore, due to the danger of gas leakage, we will close valves as instructed by the the digital twin and report the work to the digital twin.
- Challenges
- - Real-time adaption to contingent and fluid environment
- - Rubble removal with communication fault (delay or shutdown)

Mission P5 Tunnel Accident Response (Planned)
Deploy an inspection robot in a multi-faceted accident inside a tunnel.
While checking the interiors of crashed cars inside a tunnel for victims, offer reports on the numbers and locations of people in need of rescue.
- Challenges
- - Ability to do maneuvering work under a visually obstructed environment
- - Ability to maneuver and work under communication disruptions (delays/block)
- - Navigation robustness to physical damage abilities
- - Ability to work and maneuver in narrow locations


Mission P6 Emergency response
This competition features emergency accident response by robots. An abnormality in the operating state or an accident occurs during investigation and inspection by inspection work instructions provided by the digital twin. To respond to the emergency, the robot will quickly collect information on the damage in the plant after the accident and report it to the digital twin, perform the work instructed by the digital twin, implement the emergency response, and report the details of the work to the digital twin.
- Challenges
- - Real-time adaption to the unforeseen and fluid environment
- - Investigation with visual obstacles like smoke or vapor
- - Emergency response with communication fault (delay or shutdown)