

大規模災害を想定した、被災状況の調査や
被災者に対する救援物資の供給など
災害現場では、地上や海上の交通手段を使用できないケースが想定されます。
その為、飛行ロボットやドローン(回転翼や固定翼、VTOL機など)を複数機使用し、
被災状況の調査や被災者に対する救援物資の供給などを実施します。
タスク
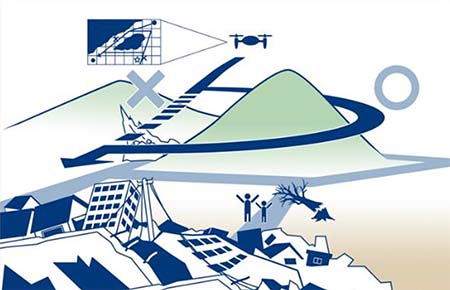
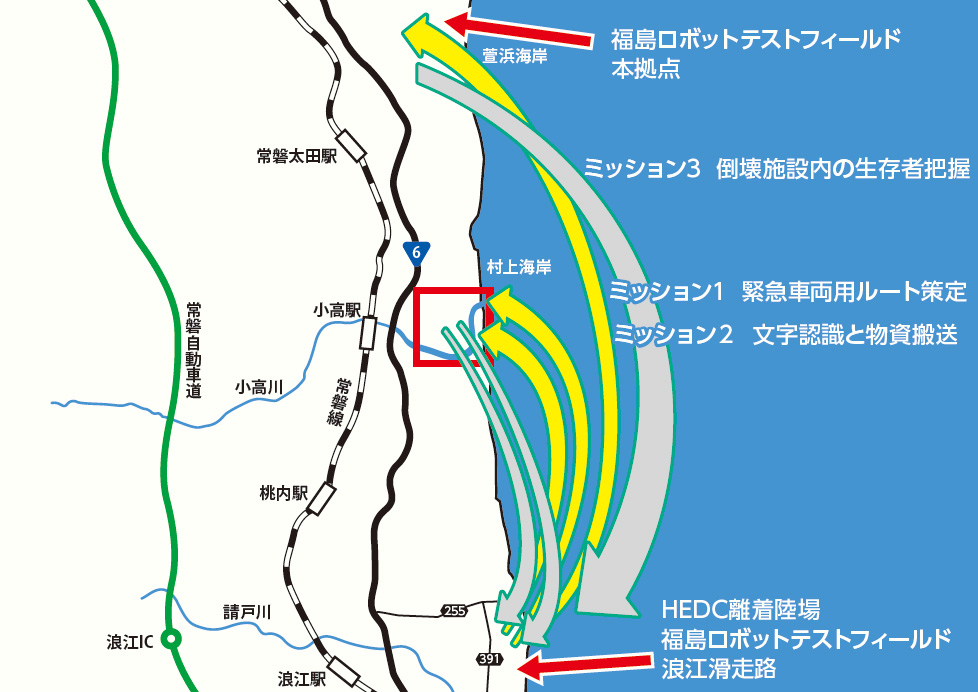
MISSION 1 飛行ロボットを用いた救援車両のルート探索
指定エリアを空中から調査し、障害物の正確な位置や種類の特定と、救援車両の通行可能ルートを策定し報告します。
- チャレンジ
- 状況調査の正確さと迅速性

MISSION 2 要救助者の特定と救援物資の把握と搬送
要救助者を探索し、正確な位置と状態の報告を行います。
また、地表に描かれた救援物質の文字を認識し、指定された場所へ搬送します。
- チャレンジ
- 探索と救援物資の判読、搬送の正確さと迅速性
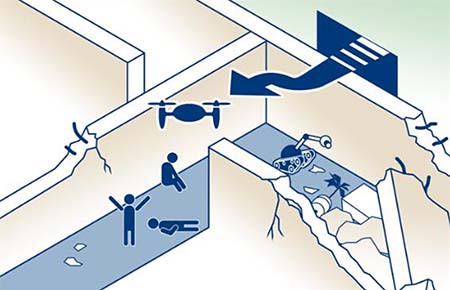
MISSION 3 遠隔地建屋内の被災者状況把握
遠隔地の建屋内へ侵入し、被災者状況調査を行います。
また、建屋内にいる要救助者の人数と状況を把握し、3Dマップを作成。位置を報告します。
- チャレンジ
- 建屋内の状況調査と被災者の探索、また被災者情報の正確さと迅速性
詳細説明
(競技参加者向け)
競技参加にあたり、安全な飛行を最優先として飛行計画を立てる必要があります。
日本国内の法令遵守が必須となるため、違反するチームは例外なく失格とします。
下記の詳細説明動画を必ず視聴し、参加の準備を進めてください。
①競技概要
②安全レギュレーション/
審査基準・配点
③電波法の規制
④航空法の規制
Q & A
- Q.出場申込書類のSheet 2の安全対策の確認にて「"緊急位置通報システム(例えば: Trackimo, SPOT, など)が設置されていることを示す画像」という項目がある。私たちのチームでは、Ublox社のM9N GPSモジュールをPixhawkフライトコントローラに接続しGNSSシステムを受信しています。本項目では、TrackimoやSPOTなど、上記システムとは別にスタンドアロンのGPSモジュールが必要であることを意味しているのでしょうか
- A.スタンドアロンの報告システムが必要です。
- Q.プレ大会の際は2時間でしたが、本大会では1時間になるのでしょうか。
- A.競技時間は1時間になります。
補注:より多くの競技参加チームにご参加いただくための設定となります。
- Q.競技評価点について、粒度の細かい資料(具体的な評価項目、点数)について公開予定はあるでしょうか。
- A.募集要項に記載の通り、HEDC競技委員会ではミッションシナリオの達成にむけ、新たな技術・ソリューションを提案いただく事に主眼を置いているため、詳細資料の公開予定はございません。
補注:審査委員会にて具体的な評価項目や点数配分は事前に設定されており、項目に沿った評価が行われます。
- Q.各チームで個別にミッションの遂行方法を検討し、遂行方法や達成度に応じて評価が下されるということでしょうか。
- A.提案内容と、実際のパフォーマンスを総合的に勘案し点数付けします。評価にあたっては複数の審査委員で合議の上、決定します。
補注:HEDC審査委員会はHEDC運営委員会と独立した形で組織されています。競技当日は審査委員会に所属する委員が個別に評点を行う事になります。
- Q.機体自体が、水面に落下した場合でも浮力が確保できる構造となっています。
このような場合、フロートの追加装備は必要でしょうか。 - A.海面に浮上して、沈まないのであれば、フロートは不要になります。
補注:着水に備える機構があれば、種別は問いません。
提出書類にも同機構が備わっていることをご記載ください。
- Q.機体ペイロードの仕様上、水没対策として記載されているフロートの追加搭載ができない機体はどうすればよいでしょうか。
- A.あくまでも明らかに水没してしまう機体に対して上記対策を義務付けるものであり、あらかじめ水没対策が機体に備わっているものは適用外となります。
- Q.チームメンバーの変更は可能でしょうか。
- A.エントリー後、国土交通省航空局への飛行申請通過に向けた過程(修正指示など)での変更は問題ありません。なお航空局申請通過後は特段の事情が無い限り、変更不可となりますのでご了承ください。
補注:航空局申請を行う際には10名以上の登録も問題ございませんが、競技会への正式参加チームメンバーは最大10名となります。
- Q.事前の機体認証は必要でしょうか。
- A.募集要項に記載の通り、事前に国土交通省航空局へ申請いただき、機体登録番号を取得する必要があります。
- Q.独自回線で通信手段を確保するつもりですが、(安全のため)機体通信の予備回線としてLTEを使用できるよう、機体にLTE通信機を搭載している場合、審査委員にどちらの通信手段を使用しているか常に判別できるよう明示すれば、減点対象とならないでしょうか。
- A.明示していただければ、搭載しているだけでは減点対象となりません。
- Q.ミッション1の空撮データの提出について質問させて頂きます。データ提出媒体について指定はありますでしょうか?microSDを想定しています。
- A.クラウドストレージをいたしますのでそちらに対してアップロードしていただくことを想定しております。またご案内いたします。
- Q.ミッション1の空撮データの提出形式について指定はありますでしょうか?
- A.現場撮影写真とルート入り電子地図を1ファイルにまとめたものを上記ストレージにアップロードいただくことを想定しています。
- Q.浪江滑走路からの管制により市街地フィールドの探査を実施した後、ミッションを終えた小型マルチコプターを浪江滑走路からの管制でなく、福島RTF内の目視内プロポ操作に切り替えて着陸させた場合、減点対象になりますでしょうか?
- A.すべての機体が浪江滑走路に帰還することが望ましいため、浪江滑走路に戻らない機体がある場合にはプロポ操作であるかどうかに関わらず減点の可能性があります。また、機体が帰還したとしても途中でプロポによる介入があった場合にも減点の可能性があります。
- Q.上記質問に関して、追加で質問させてください
ご回答では、「浪江滑走路に戻らない機体がある場合にはプロポ操作であるかどうかに関わらず減点の可能性があります」とありましたが、ルールブックを改めて確認したところ、ミッション3で建物内調査を行った小型UAVについては浪江滑走路に帰還する必要がないと理解しました。この点について、今一度ご確認をお願いできますでしょうか。 - A.ご指摘いただいたように小型のUAVは浪江滑走路への帰還までは求めておりませんでした。失礼いたしました。ただし、途中でプロポによる操作があった場合には減点の可能性がございますので、ミッション遂行後であっても着陸操作にプロポの介入があった場合には減点の可能性がございます。
- Q.機体ペイロードの仕様上、パラシュートの追加搭載ができない機体はどうすればよいでしょうか。
- A.落下分散を考慮したパラシュートの搭載は推奨条件であり、義務ではありません。
補注:機体重量や飛行速度によって条件が変わるため、安全への配慮を大前提とした回答となります。全く対策がない機体を承認する主旨ではございませんので、ご注意ください。
- Q.ミッション3において、小型マルチコプター(子機)が市街地フィールドを探査する間、VTOL(母機)は市街地フィールド上空にて固定翼モードで滞空旋回することは可能でしょうか?
- A.飛行可能エリア(添付の赤枠)内であれば旋回可能です。
- Q.上記質問に関連し、市街地フィールドから海岸までの陸地上空は滞空旋回禁止でしょうか?
- A.高圧電線上空について、鉄塔上空以外の電線上空は飛行禁止とさせていただき、電線上空をのぞく飛行可能エリア(添付の赤枠)内であれば旋回可能です。
- Q.2つ上の質問に関連し、VTOLの遷移飛行(固定翼モード⇔マルチコプターモード)の実施エリアについて指定はありますでしょうか?
- A.催し物上空の飛行は飛行高度が150m以下でなければならないですが、それ以下の飛行高度であれば、遷移飛行の実施エリアに制限はありません。
- Q.ミッション3を遂行するにあたり、市街地フィールド上空で親機をホバリングさせて子機を切り離すのではなく、固定翼機で飛行状態のまま子機を切り離してもよろしいでしょうか。その場合、切り離し地点(交差点中央)から少し離れたポイントで分離することになりますが、よろしいでしょうか。
- A.所定のホバリング位置で子機の切り離しを行わない場合には減点対象となりますが、固定翼機から子機を切り離すことは問題ありません。