
過酷環境における4つの標準性能評価(運動性能、探査性能、地図生成能力、自律性能)
プラントや災害現場を抽象化した、様々な過酷環境因子を伴うフィールドにおいて、
4つの性能について評価します。
過酷環境下における、ドローンの社会実装促進を目指します。
ロボット
- 遠隔操縦型・自律型いずれでも可。ロボットの直接目視はできない。
- フィールドにおけるタスクを実行できるもの。移動形態は問わない。
- 総重量10kg以下。スタート時に合計1.5mの直方体に収まること。
- 回転翼の場合はガードを取り付けること。
- 台数制限なし。
ロボット操縦者
1名(競技中の交代を認める)
競技フィールド
4種類のフィールドで4つの性能を評価する。
各フィールドは動的な環境の変化を伴うものとする。
競技時間
競技時間は30分(5分セッティング、20分競技、5分撤収)とする。
耐環境性を有するロボットは加点される。
タスク
性能評価内容
- 運動性能(MOB)
- 競技フィールドを10往復する時間を評価します。
- 探査性能(DEX)
- タスクの完遂度で評価します。
※タスクはルールブック参照(後日公開)
- 地図生成能力(MAP)
- 競技フィールドの地図生成、探査対象の位置推定と意味理解、およびその情報の地図内埋込性能を評価します。
- 自律性能(AUTO)
- MOBおよびDEXの自律化を評価します。
(概形、上面図と経路)
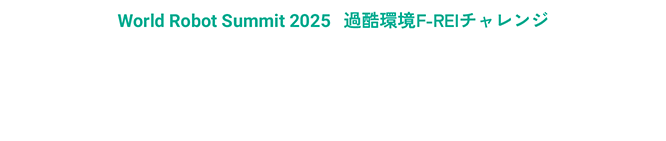
競技フィールド 1 狭隘空間水平スラローム
幅2m×高さ2m×奥行き10m(予定)の閉鎖空間において交互に配置された垂直壁を回避しながら往復を行います。
- チャレンジ
- 性能評価(左右方向の運動性能、探査性能、地図生成能力、自律性能)
(概形、上面図と経路)
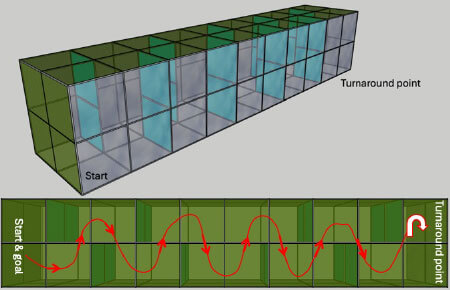
競技フィールド 2 狭隘空間垂直スラローム
幅2m×高さ2m×奥行き10m(予定)の閉鎖空間において交互に配置された水平壁を回避しながら往復を行います。
- チャレンジ
- 性能評価(上下方向の運動性能、探査性能、地図生成能力、自律性能)
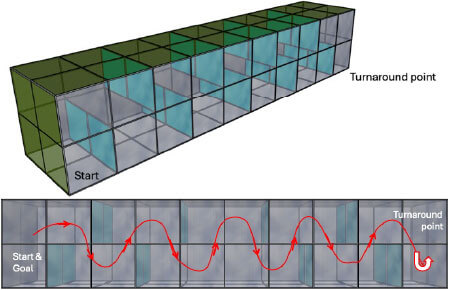
トラスフィールド(例)
競技フィールド 3 トラスフィールド
パイプで構成された正四面体と三角柱を組み合わせたトラスフィールドの往復を行います。
- チャレンジ
- 性能評価(運動性能、探査性能、地図生成能力、自律性能)

競技フィールド 4 複合型(シークレットフィールド)
競技フィールド1〜3の基本単位を組み合わせたフィールドで競技当日に公開されます。
- チャレンジ
- 性能評価(運動性能、探査性能、地図生成能力、自律性能)

過酷環境因子の導入
狭隘開口部、風、閉鎖空間、煙FOG、粉塵DST( 粉もしくは紙片)、強光、暗所ネゴシエイトNEG、雨、電波障害
過酷環境チャレンジ要素は競技ステージ(予選,準決勝,決勝)に応じてフィールドに選択可能な形で設置され,各過酷環境チャレンジ要素の難易度により加点されます。
過酷環境チャレンジ要素は準決勝および決勝で難易度が上がり、選択幅が狭くなります。